
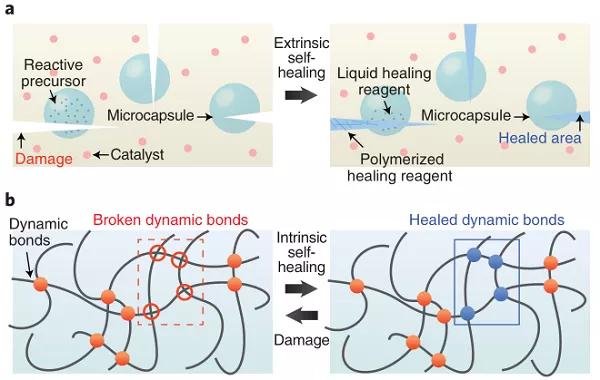
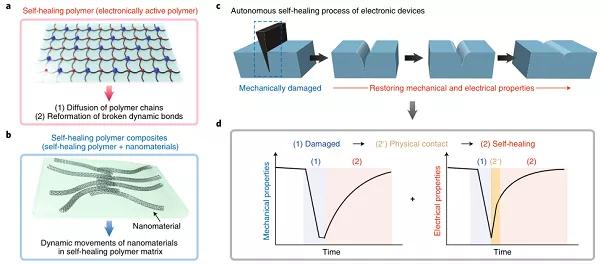
自修复材料可大致分为两类:外源型(图1a)和内源型(图1b)。当分散的愈合剂(通常由聚合物基质中的反应性前驱物和催化剂组成)在损伤后释放时,会发生外源型自修复。这些愈合剂可以通过自主聚合反应和交联网络的重建来修复损伤区域。尽管这种方法非常可靠,但它只允许材料有限次数愈合,而且通常不能在相同的位置重复愈合。相比之下,内源型自修复材料不需要添加愈合剂,并且受损区域能够通过聚合物基质的重组重复愈合。此过程是通过动态共价键或非共价键的再生以及受损界面上聚合物链的缠绕重建了基体。
参考文献:
https://doi.org/10.1016/j.mattod.2020.10.026
斯坦福大学鲍哲南教授团队回顾了自修复电子材料的发展,并研究了这些材料如何用于制造自修复的电子设备。同时文中探讨了自修复电子系统的潜在新功能,这些功能通常在传统电子系统中是不可能实现的,并讨论了为实际应用提供自修复柔性电子系统的当前挑战。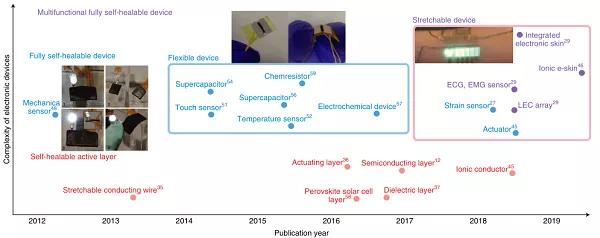
图3. 具有自修复功能的柔性电子设备。最近报道的基于出版年份和电子设备复杂性的自修复柔性电子设备。红色指可自我修复的活性层;蓝色指独立的可自我修复的电子设备;紫色指多功能可自我修复的可拉伸系统。
参考文献:
DOI: 10.1038/s41928-019-0235-0
受许多生物体的启发,软机器人几乎完全由柔性软材料制成,使其适合于不确定的动态任务环境中的应用,包括人机交互。它们固有的柔韧性可以吸收冲击并保护它们免受机械冲击。但是,用于其构造的软材料极易受到损坏,例如在操作中不受控制和不可预测的环境中存在的尖锐物体所造成的割伤和穿孔。针对该问题,比利时布鲁塞尔自由大学的Bram Vanderborght团队利用了材料的自愈性能,构造了软机器人自修复弹性体,开发出了可自我修复的软气动执行器的三种应用:软夹持器,软手和人造肌肉。该材料中热可逆的共价网络使其具有治愈微观和宏观损伤的能力,而且在损伤处,没有弱点形成,并且执行器的全部性能在愈合后几乎完全恢复。
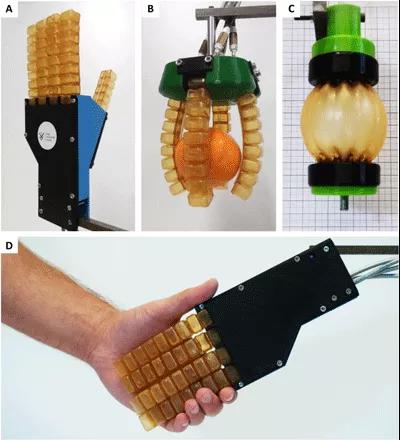
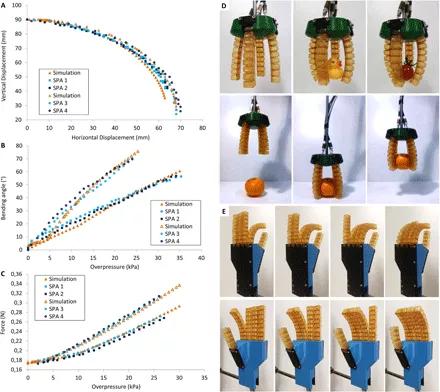
图5. 软气动执行器。(A和D)自修复软气动手。 (B)自修复软气动抓手。 (C)自修复等褶状气动人工肌肉。

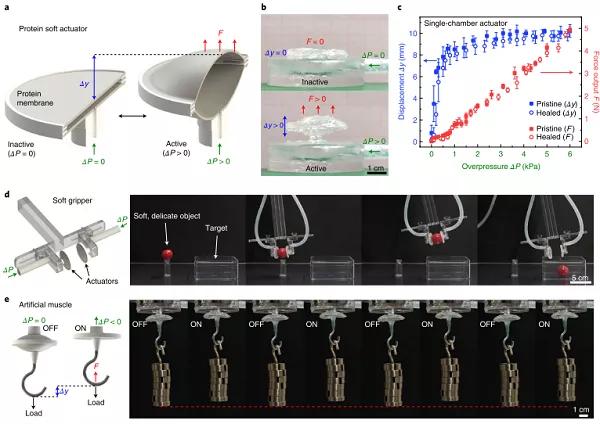
当前的自修复材料具有限制其实际应用的缺点,例如低的治疗强度(低于兆帕)和长的治疗时间(小时)。 针对这个问题德国马普研究所的Melik C. Demirel和来自美国宾州州立大学的Metin Sitti团队基于鱿鱼腕足吸盘中的环状齿蛋白序列,通过蛋白质工程技术,成功制备出了兼具高愈合后强度、超快愈合速度(愈合后强度达到2-23 MPa,愈合时间1s)和生物可降解的自愈合弹性体材料,并将这种材料用于制备气动人工肌肉和柔性抓手。这种材料可以在一秒钟内通过局部加热自我修复微观和宏观机械损伤。并且经过系统优化,可以改善其氢键结合的纳米结构和网络形态,具有可编程的愈合特性,超过其他天然和合成软材料的数量级。
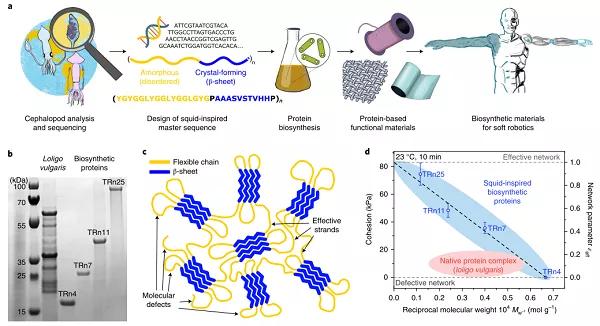
图 7. 蛋白链结构及其高级折叠结构。鱿鱼蛋白质的分析,鱿鱼启发的主序列的设计以及蛋白质库的生物合成,产生了基于蛋白质的功能性自修复材料,适用于软促动器和机器人应用。b,天然Loligo vulgaris蛋白复合物和生物合成TRn4,TRn7,TRn11和TRn25多肽的蛋白大小。c,生物合成串联重复多肽的纳米结构由通过柔性链(黄色)连接的β-片状纳米晶体网络(蓝色)组成,具有分子缺陷(悬空的末端和环)。d,由于优化的网络形态,鱿鱼启发的蛋白质(在室温下)的自愈特性比天然蛋白质得到的改善。误差线,标准偏差(n = 5)。
参考文献:
https://doi.org/10.1038/s41563-020-0736-2
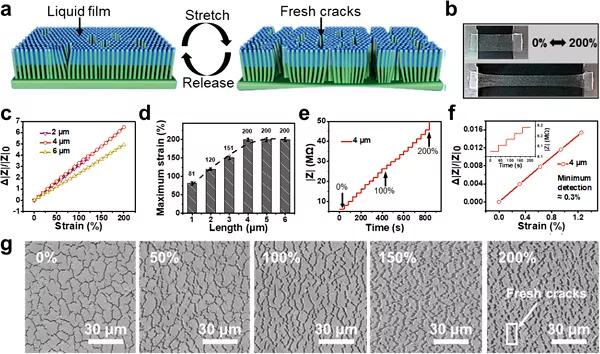
电阻应变传感器具有出色的灵敏度和顺应性,因此在柔性和可拉伸电子产品的开发中起着至关重要的作用。然而,由于固体导电层与聚合物之间的低粘合强度以及常规固体导电层内部不可弥补的干摩擦,这种传感器的耐用性较差。针对该问题,中国科学院理化技术研究所生物启发智能界面科学实验室田野团队受动物角膜泪膜的结构和出色的耐磨性的启发,设计了基于由改性聚二甲基硅氧烷(PDMS)制成的仿生微绒毛上形成的均匀自修复无磨损液态膜的超耐久应变传感器。将包含离子液体的乙醇溶液添加到PDMS微绒毛中,由于表面化学性质和特殊结构,该微绒毛具有超亲液性。在蒸发过程中,离子液体通过压力向上驱动,并形成连续的导电膜。作为传感层,当反复拉伸和释放时,由于湿摩擦而使毛细管稳定化的液膜无损,并且在释放后,由于毛细管力引起的自我修复能力,裂缝将完全恢复,从而使应变传感器能够具有超过22500个装卸循环的高耐久性。这项工作提出了一种构建超耐用电子产品的方法。
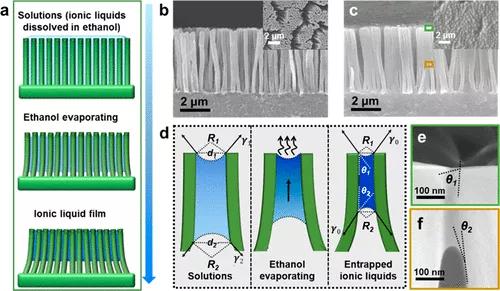
图9. 基于液膜的超耐用应变传感器的制造。(a)液膜的形成过程。(b,c)分别具有和不具有离子液体膜的微绒毛的横截面SEM图像。插图:顶视图SEM图像。(d)分析驱动力。(e,f)液膜顶部和底部的弯液面夹在微绒毛之间。
参考文献:
https://doi.org/10.1021/acsnano.8b08911

皮肤和肌肉在受到损伤时会自动自我修复,而这一能力一直是科学家梦寐以求想赋予材料的一种特殊性能。然而,目前的可修复材料的大多数设计都需要外部能量才能愈合或者这些材料的机械强度较弱。动态超分子材料可以在一定程度上解决以上问题,它在室温下无需外部条件便可以发生自我修复。但是,具有自修复性能的动态超分子材料往往不能适用于极端条件,原因在于:(i)当可修复材料在水下受伤或破裂时,水分子会干扰动态键的重新连接,导致材料无法修复。(ii)在冻结条件下,可修复材料中键的动态特性遇到很大的障碍,从而极大地限制了自修复过程。(iii)一些自我修复的相互作用易受pH值变化的影响。针对以上问题,来自天津大学化工学院张雷教授团队,通过在聚二甲基硅氧烷聚合物中协同结合多强度氢键和二硫键交换,设计出一种具有普遍自愈性和高拉伸性的超分子弹性体。它可以在极端条件下实现快速的自主自修复,包括在室温、超低温(−40°C)、水下、过冷的高浓度盐水(-10°C下30%NaCl溶液中)和强酸/碱环境(pH=0或14)。这些性质归因于动态强氢键和弱氢键与强二硫键的协同相互作用。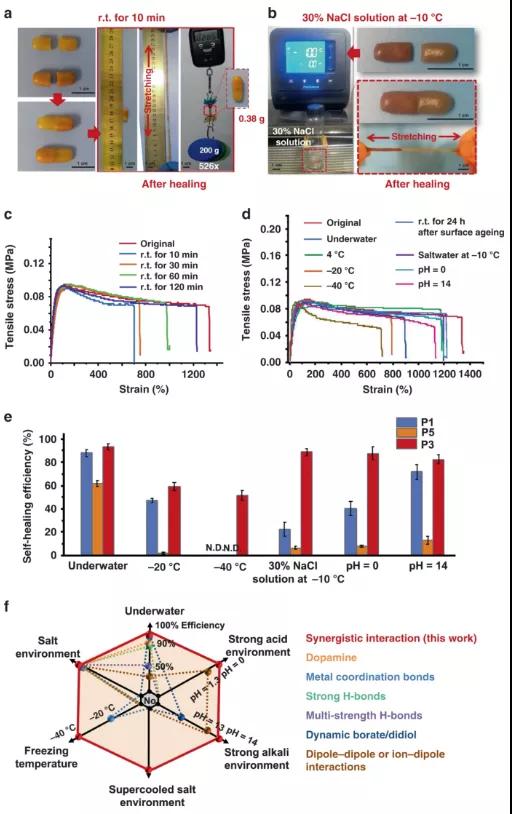
参考文献:
https://doi.org/10.1038/s41467-020-15949-8
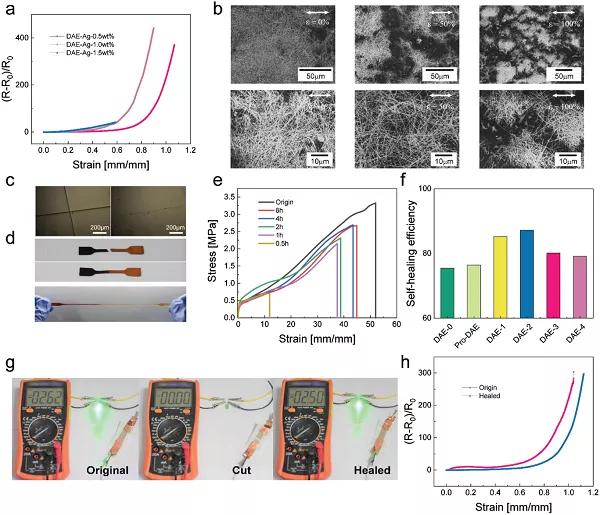
柔性可拉伸电极在可穿戴电子领域中具有广泛的应用。近年来,随着医疗器械的发展,人们对可拉伸电极材料的功能性要求也越来越高。如用于监测生物电信号的电极材料不仅需要优异的弹性和导电性,还需要和生物界面具有优异的粘附性来保证信号的稳定性。目前所采用的电极所采用的基体材料通常采用硅橡胶类弹性体,这类聚合物在具有高弹性的时候并不能具备粘附性。因此制备一种本身具有粘性的弹性体具有重要的意义。针对这一问题,南京大学化学化工学院张秋红副教授、贾叙东教授课题组将带有二羟基的多巴胺基团引入到以聚四氢呋喃醚基聚氨酯体系中,利用体系内的动态氢键和多巴胺间相互作用,制备了一种新型的“粘”弹体(断裂形变5100%,断裂强度1.9 MPa,粘附强度62 kPa)。
参考文献:
https://doi.org/10.1002/adfm.202006432

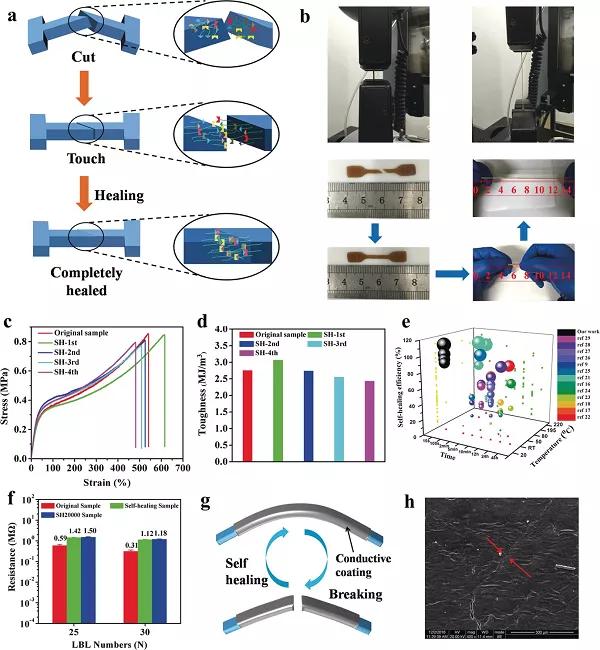
图13. 自修复性能测试。a)自我修复过程。b)拉伸前后自我修复的多氢键弹性体的照片。c)原始,第一,第二,第三和第四愈合的多氢键弹性体的典型应力-应变曲线和d)韧性。e)比较不同自修复聚合物弹性体的机械自修复效率。f)25和30 LBL循环的应变传感器的电气自修复性能。g)电气自我修复过程。h)带有25个LBL循环的已修复传感器的SEM图像。
未经允许不得转载,授权事宜请联系kefu@cailiaoren.com。
文章转载自微信公众号:材料人